
Самый мощный электромотор для лодки
Какой лодочный электромотор считать самым мощным? Тот, который потребляет большую мощность от аккумуляторной батареи? Или может быть тот, который легко толкает вперед даже тяжелую лодку, потребляет маленький ток и долго работает от аккумуляторов?
Бензиновый и электрический моторы для лодки
Лодочные электромоторы могут развивать ту же тягу, что и двигатели внутреннего сгорания обладая при этом значительно меньшей мощностью на валу. Это происходит благодаря различной форме кривых крутящего момента электрического и бензинового двигателей. У двигателя внутреннего сгорания график крутящего момента имеет выраженный пик, из-за которого максимальный момент доступен только в ограниченном диапазоне оборотов вала. Зависимость крутящего момента от оборотов у электродвигателя гораздо более плоская и его достаточно при любой частоте вращения

Пологая характеристика момента позволяет устанавливать на лодочные электромоторы более эффективные гребные винты. КПД гребного винта у некоторых электромоторов для небольших лодок в три раза выше, чем у подвесных бензиновых двигателей того же класса.
Какая бывает мощность
Производители лодочных моторов используют разные виды мощности. Встречаются мощность на валу, потребляемая мощность и даже тяга. Поэтому прежде чем сравнивать лодочные электромоторы различных марок нужно привести имеющиеся данные к «общему знаменателю»
Единый критерий для сравнения важен. Мощности, измеренные в разных местах, существенно отличаются друг от друга. Мотор, развивающий на валу 4 л. с., на винте выдает всего 1 л.с.
Потребляемая мощность, на валу и на винте

Потребляемая мощность – часто используется как характеристика электродвигателя для лодки (мощность = ток х напряжение). Измеряется в Ваттах или лошадиных силах. Производители бензиновых или дизельных лодочных моторов этот вид мощности не используют. Однако для двигателя внутреннего сгорания потребляемую мощность также можно посчитать, если умножить теплотворную способность топлива на его расход.
Мощность на валу – используют производители подвесных бензиновых лодочных моторов. Этот вид мощности считается также как у автомобиля (мощность = крутящий момент х угловая скорость). Единица измерения – лошадиные силы или ватты. Мощность на валу учитывает потери в редукторе, но не учитывает потери на винте, которые составляют от 20 до 70%.
Мощность на винте – более ста лет служит общепринятой характеристикой двигателя в судостроении. Учитывает все потери мощности и определяет энергию, передаваемую лодке двигателем.
Тяга лодочного электромотора
Во время вращения винта на поверхностях лопастей возникает подъемная сила. Составляющая этой силы направленная по оси движения лодки называется упором или тягой. Она характеризует ту часть подъемной силы, которая толкает судно вперед.
Полезная мощность, производимая лодочным винтом, равна его тяге, умноженной на текущую скорость лодки. В характеристиках электромоторов производители всегда указывают максимальное значение тяги. Сделать по ней вывод о мощности электромотора на винте без установки датчиков и проведения измерений нельзя.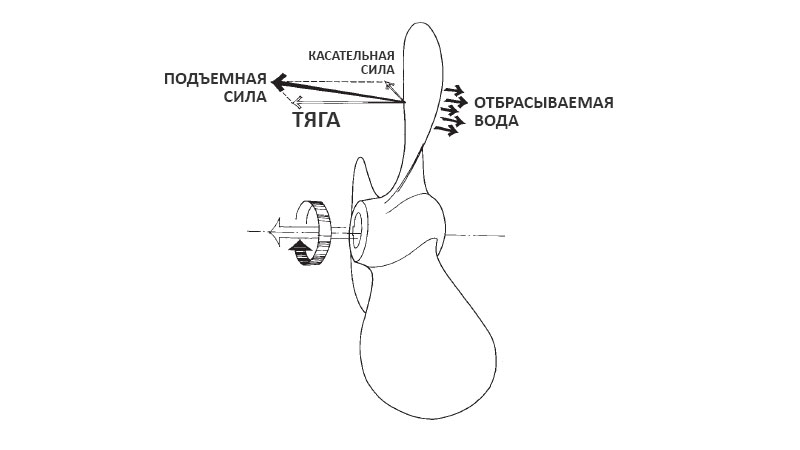
Тягу определяют в ходе испытаний, во время которых лодку соединяют с пирсом динамометром и заставляют двигаться вперед. Проверку проводят на спокойной воде, в безветренную погоду, на достаточной глубине и расстоянии от берега. Для носовых лодочных электромоторов значение тяги чаще всего указывают в фунтах силы (lbs).
Потери мощности в лодочном электромоторе

Общая эффективность силовой установке на лодке с двигателем внутреннего сгорания около 15%. Для судна с электромотором такой показатель – непозволительная роскошь. Считается, что лодочный электродвигатель работает эффективно, если с учетом потерь на винте его КПД около 50 %. При этом КПД электромотора должен быть не менее 80%, а винта не мене 63%.
Потери мощности пропорциональны сопротивлению проводника и квадрату протекающего через него тока. Если ток возрастает вдвое, потери возрастают в четыре раза. Если ток растет в десять раз, потери увеличиваются в сто. Уменьшить ток и потери можно, если повысить напряжение в цепи.
Общепринятое на сегодня напряжение мощных лодочных электромоторов 48 вольт, но для небольших лодок подходят и 24-вольтовые модели. При силе тока 50 А максимальная мощность электромотора в 12-вольтовой системе составит 600 Ватт, а в 24 Вольтовой – 1200 Ватт
Второй способ снизить потери в цепи постоянного тока – это увеличить сечение кабеля. Правильно подобранный кабель повышает эффективность и безопасность электрической системы, устраняет локальный перегрев и снижает потери энергии.
Винт
Высокий КПД имеет винт с большим диаметром, шагом и низкой скоростью вращения. Однако с таким винтом может работать только мотор, развивающий высокий крутящий момент.

Большинство гребных винтов для подвесных моторов небольших лодок созданы на основе испытаний проведенных еще в 1940–1960-х годах прошлого века. Общие принципы проектирования, появившиеся тогда, систематизированы в виде таблиц и графиков и используются изготовителями до сих пор.
При разработке современных винтов используют другой подход. Сначала на компьютере создают трехмерную модель, а затем шаг и кривизну профиля винта оптимизируют для каждого сечения с учетом изменяющихся вдоль диаметра условий обтекания потоком воды. Винты этого типа называют винтами с переменным шагом. Их потери меньше, а КПД выше.
Виды электромоторов
Подвесные

Подвесные электромоторы устанавливают на транце или реже на носу лодки. В стандартном исполнении электромотор соединяется с системой рулевого управления, в моделях с румпелем лодкой управляют поворачивая двигатель. Мощность румпельных электромоторов варьируется от 1 до 4 кВт, а у моделей с рулевым управлением достигает 15 кВт.
Как правило мощные подвесные электромоторы рассчитаны на напряжение 24-48 Вольт. 24 вольтовый электрический двигатель мощностью 2,2 кВт развивает на винте тягу 124 lbs и сопоставим по этому показателю с подвесным бензиновым мотором мощностью 6,5 л.с. Двигатель мощностью 15 кВт эквивалентен бензиновому мотору 35 л.с
В подвесных лодочных электромоторах используют асинхронные двигатели переменного тока или синхронные двигатели на постоянных магнитах. Оба типа двигателей бесщеточные, не имеют изнашивающихся частей и не требуют обслуживания.
Pod электромоторы
POD электромоторы подходят как для однокорпусных лодок и катеров, так и для катамаранов

Электромотор состоит из блока управления и гондолы внутри которой установлен асинхронный или BLDC электродвигатель. Гондола аэродинамической формы крепится к днищу судна фланцами из нержавеющей стали между килем и рулем. Чтобы избежать вибрации на руле, вызванной турбулентностью за винтом, и снизить сопротивление потоку воды гондолу стараются располагать ближе к килю.

Производится две модификации POD электромоторов — фиксированная и поворотная. Поворотная модель соединяется с системой рулевого управления или румпелем и обеспечивает более высокую маневренность судна
Электрические лодочные моторы типа Pod выпускаются мощностью от 1 до 25 кВт.
Бортовые лодочные электромоторы

В бортовой силовой установке электродвигатель устанавливают внутри судна и соединяют с винтом валопроводом. Бортовым моторам требуется принудительное охлаждение. В зависимости мощности электродвигателя оно может быть воздушным или водяным.
Установка бортового электромотора на лодку сложнее чем подвесного или POD. Дополнительно потребуется вал, муфта, сальник, втулка Гудрича (дейдвудный подшипник), дейдвудная труба. Валы электромотора и винта необходимо центрировать – они должны иметь общую ось. При неправильной установке возможны протечки через сальник
Электромоторы для профессионального использования
Если лодка или катер используется для перевозки туристов, организации экскурсий или водных прогулок, то электрическая установка может оказаться выгоднее двигателя внутреннего сгорания. Экономия достигается из-за более низкой стоимости энергии и практически нулевых затрат на техническое обслуживание.

Сравнение показывает, что при коммерческой эксплуатации судна переход с бензинового на электрический двигатель окупается за 1-2 года. Однако для этого профессиональный лодочный электромотор должен отвечать определенным требованиям:
- Иметь высокий КПД – это позволит эксплуатировать его с аккумуляторной батареей меньшей емкости, снизит первоначальные затраты, время зарядки и стоимость потребляемой электроэнергии
- Быть простым и надежным — электромотор должен выдерживать ежедневную интенсивную нагрузку и иметь минимум лишних функций. Дополнительные возможности, такие как встроенный компьютер c GPS, повышают цену и могут стать источником неисправностей в будущем.
- Стоимость ремонта и технического обслуживания в течении периода эксплуатации должна быть минимальной

Катамаран с установленным лодочным электромотором отправляется к месту эксплуатации
Надежность
Корпуса профессиональных лодочных электромоторов отливают из алюминия, а затем дополнительно наносят многослойное антикоррозионное покрытие. Вал делают из нержавеющей стали, а винт из бронзы. Для защиты от коррозии устанавливают жертвенный анод
В мощных электромоторах для лодок используют асинхронные двигатели переменного тока или BLDC PM электродвигатели, которые также называют вентильными. Питание вентильных двигателей осуществляется от импульсных источников энергии. При этом импульсы напряжения подаются на обмотки статора в заданные моменты времени – при определенном положении ротора относительно статора. Положение ротора определяют датчики, которые, как и импульсный источник питания, в моторах небольшой мощности находятся на печатной плате, расположенной внутри подводной части электромотора.

Внутри корпуса трехфазного асинхронного двигателя дополнительных электронных компонентов нет. На долговечность двигателя влияют только подшипники и обмотки, однако качество этих элементов в настоящее время таково, что асинхронные двигатели служат до 50 000 часов без осмотра и ремонта. Асинхронные двигатели просты, надежны и эффективны. КПД мощного электродвигателя 85-92%, что на 30% выше, чем у двигателя постоянного тока, и на 40-50% больше, чем у двигателя внутреннего сгорания.
Система безопасности электромотора для коммерческих лодок имеет как механические, например, заданный предел прочности киля, так и электронные средства защиты. Электромотор отключается при перегрузке по току, при пониженном и повышенном напряжении аккумуляторов
Экономичность

Высокий КПД достигается только при последовательном и тщательном улучшении всех элементов электромотора. Потерь мощности стараются избежать во всех узлах. Воздушный зазор в двигателе, конструкция ротора, изоляция обмоток оптимизируют на компьютере так, чтобы электродвигатель подходил для использования на лодках.
Корпуса двигателей и винты проектируют по тем же правилам, что и в коммерческом судостроении. Сначала рассчитывают обтекание подводных частей по трехмерной модели, а затем результаты проверяют на натурных гидродинамических испытаниях.
Редуктор, который устанавливают на некоторых моделях лодочных электромоторов не используют. Вместо этого вал электродвигателя напрямую соединяют с винтом, и конструируют двигатель таким образом, чтобы его обороты совпадали с оптимальными для винта
В результате во время движения электромотор не теряет мощность, не создает дополнительное сопротивление и способен долго работать на одной зарядке аккумулятора



